Method
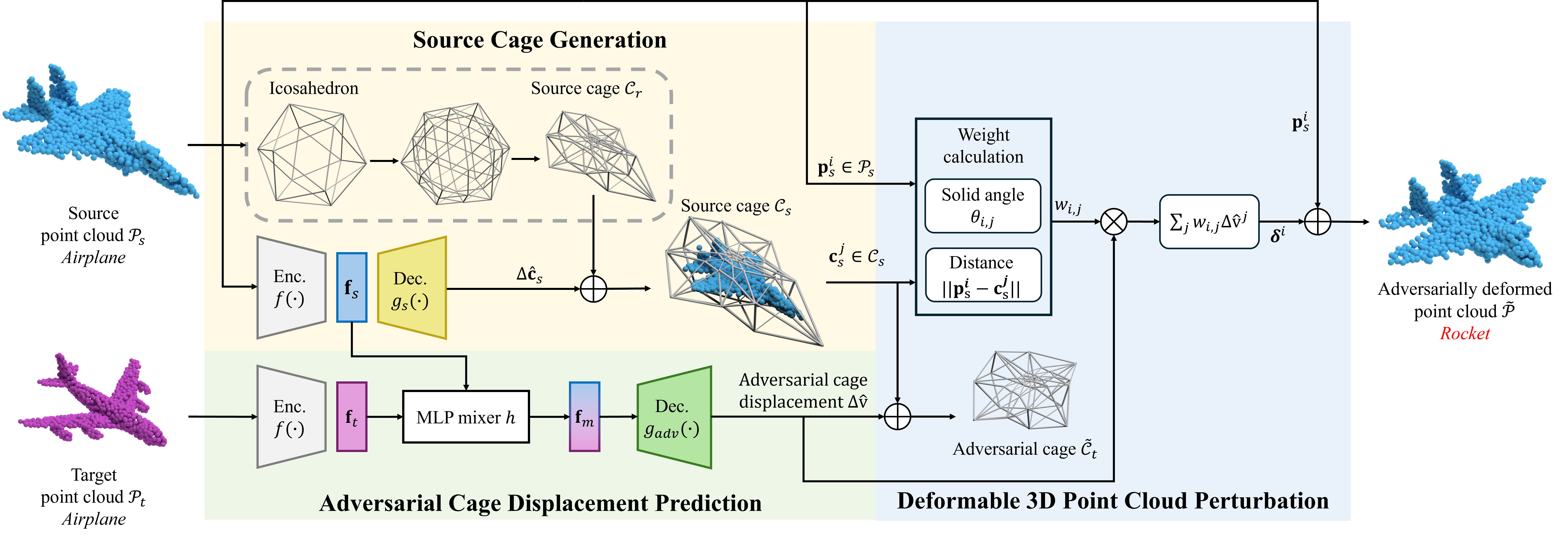
The proposed deformable 3D adversarial perturbation method, which consists of three parts: 1) source cage generation, 2) adversarial cage generation, and 3) deformable 3D point cloud perturbation.
① Source Cage Generation
We first construct a source cage that encloses the source point cloud by initializing a rough cage from a regular icosahedron and progressively refining it to better fit the underlying geometry. An encoder–decoder refinement network predicts per-vertex offsets from the source point cloud feature, allowing the cage to align more faithfully with the shape while providing a stable control structure for subsequent deformation.
We first construct a source cage that encloses the source point cloud by initializing a rough cage from a regular icosahedron and progressively refining it to better fit the underlying geometry. An encoder–decoder refinement network predicts per-vertex offsets from the source point cloud feature, allowing the cage to align more faithfully with the shape while providing a stable control structure for subsequent deformation.
② Adversarial Cage Generation
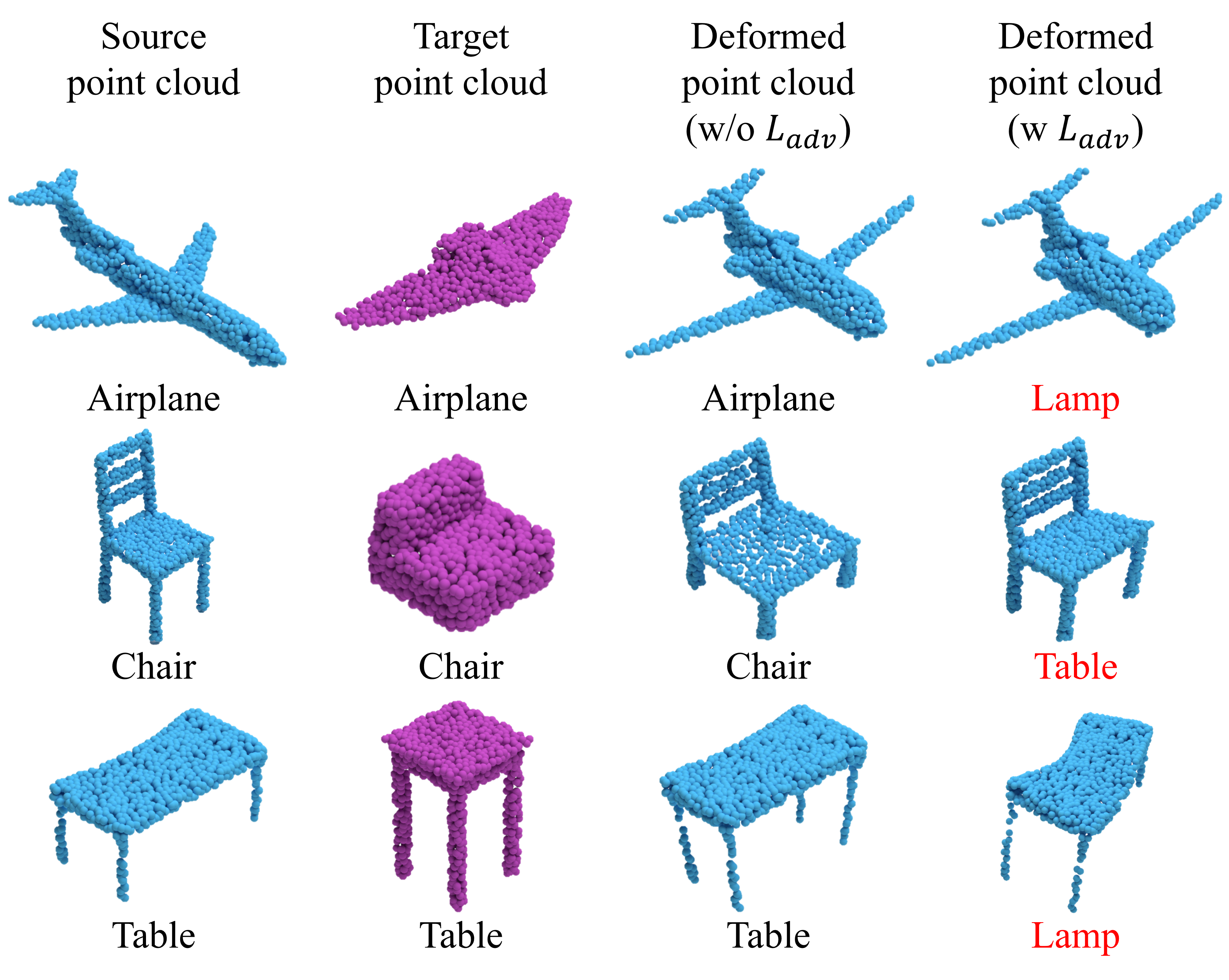
To generate adversarial deformation, we predict adversarial cage displacements by jointly encoding the source and target point clouds and fusing their geometric features. The resulting feature representation is decoded into cage-vertex displacements, producing an adversarial cage that guides the source shape toward target-aligned yet semantically consistent deformation patterns.
To generate adversarial deformation, we predict adversarial cage displacements by jointly encoding the source and target point clouds and fusing their geometric features. The resulting feature representation is decoded into cage-vertex displacements, producing an adversarial cage that guides the source shape toward target-aligned yet semantically consistent deformation patterns.
③ Deformable 3D Point Cloud Perturbations
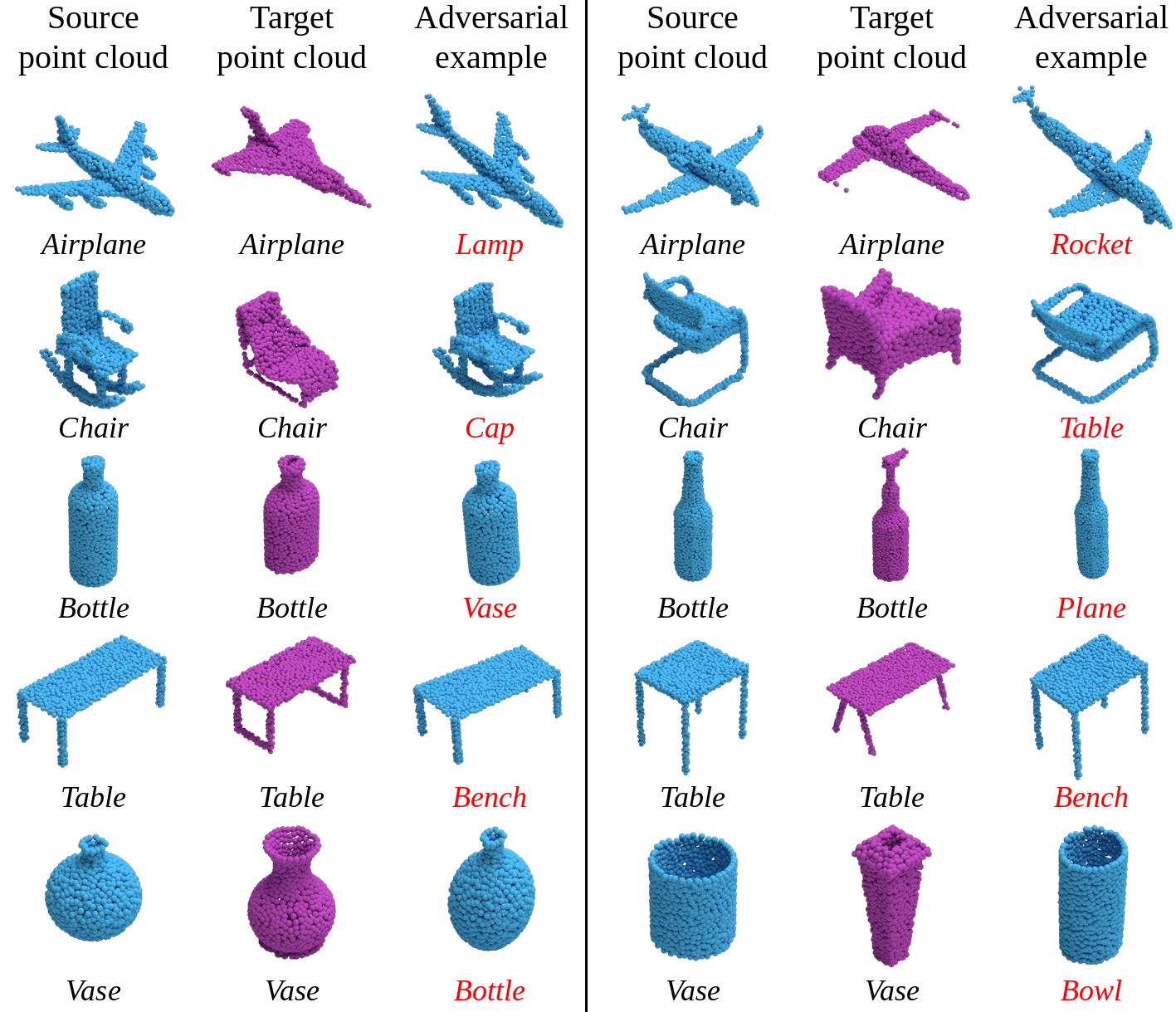
Given the adversarial cage, we compute point-wise perturbations by measuring the geometric relationship between each source point and cage vertices through solid-angle and distance-aware weights. Each point is then displaced by a weighted combination of cage-vertex motions, yielding globally coherent, visually plausible deformations that preserve object identity while effectively misleading the classifier.
Given the adversarial cage, we compute point-wise perturbations by measuring the geometric relationship between each source point and cage vertices through solid-angle and distance-aware weights. Each point is then displaced by a weighted combination of cage-vertex motions, yielding globally coherent, visually plausible deformations that preserve object identity while effectively misleading the classifier.